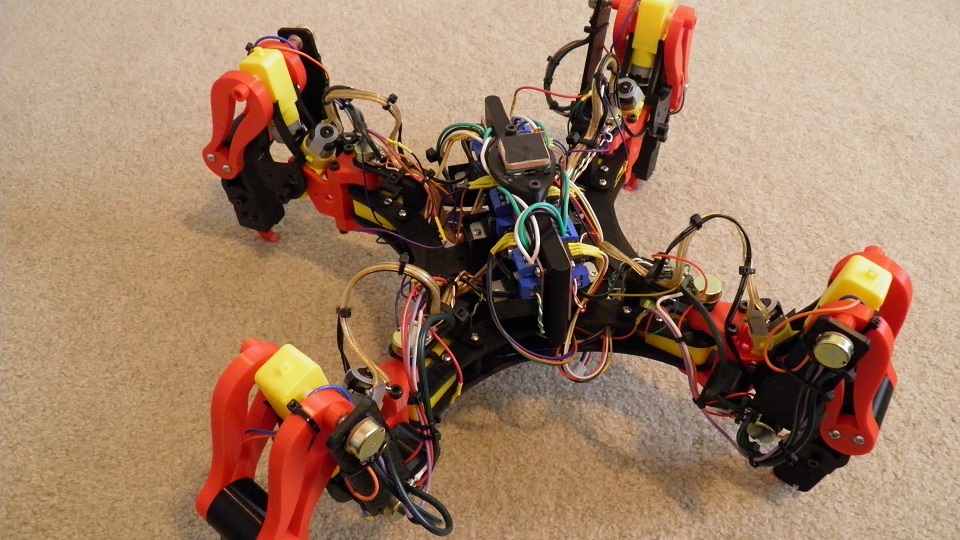
Quadruped Spider
Date Published: 3/19/2022
This project was started around December of 2021. I started this project becuase I wanted to create a robot that uses inverse kinematics. In the past, I have created four legged robots before but they did not use any type of kinemtics to calculate the joint positions. To walk, they simply estimated the foot position using a gyroscope sensor. For this quadruped spider robot, I created an inverse kinematics model to solve for the joint positions needed for the foot of the robot to land on a cartesian coordinate input. For example, when given a coordinate in the x, y, and z axis, the equation will spit out the angles that each joint must be to reach the desired position. This project is fully completed electrical and mechanical wise. However, I still need to code the robot. At this time, I have paused this project because I am working on other projects.